

Bring intelligent automation to your business
Contact our team to see how we can help with intelligent automation at your facility

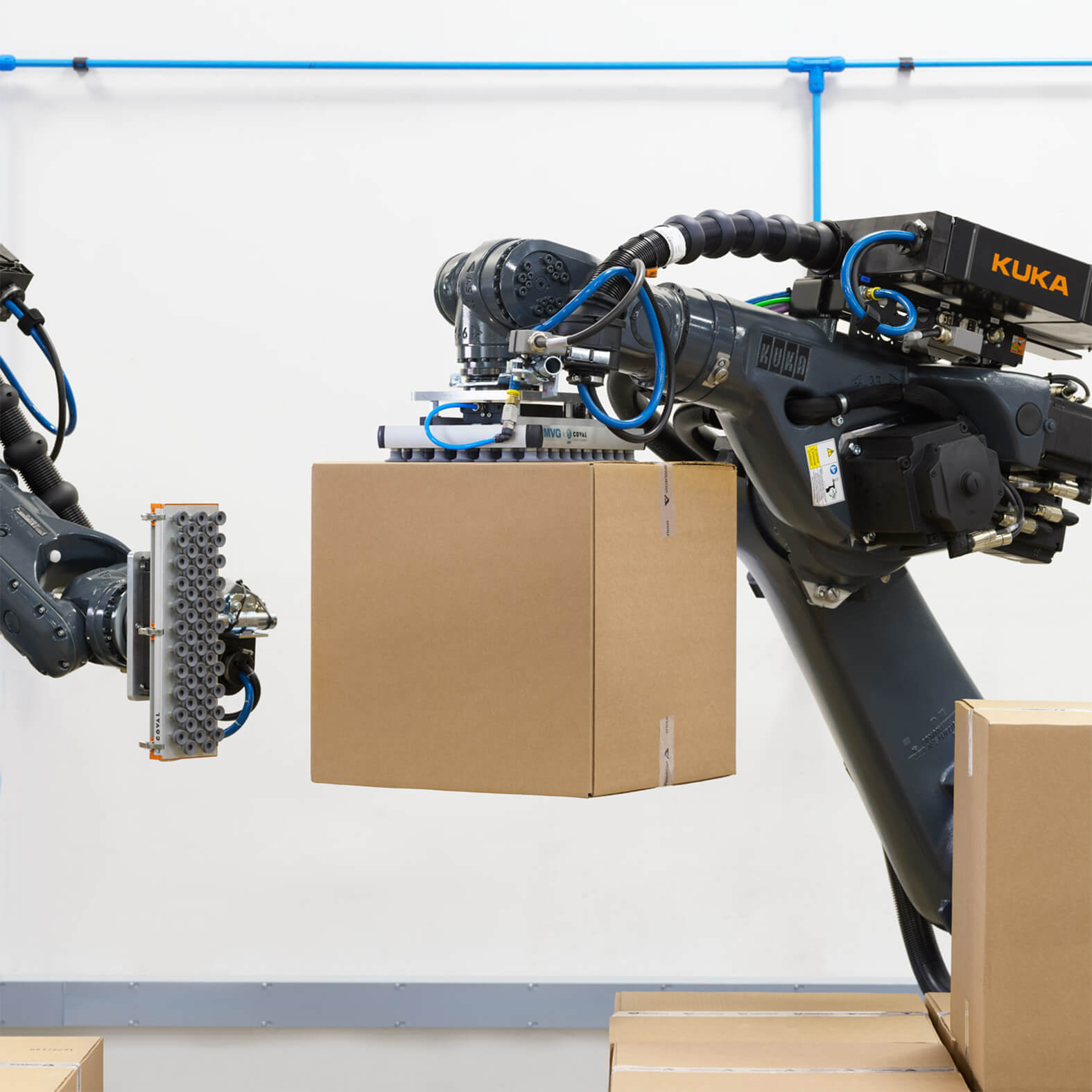
We are a turnkey robotics solutions integrator using AI to automate tasks too complex and versatile for traditional automation.
Instant changeovers in high mix operations
with no fixturing required
50-90% reduction in labor hours and
15-40% reduction in monthly costs
Zero up front CapEx with
savings starting on day one
High-mix, high-changeover kitting for boxes, pouches, trays, and other containers

High speed palletization and de-palletization for both standard and mixed pallets

Tight-fit insertion for master case repacking (variety packs), late customization for retail displays, bundling, and other use cases

Pick-to-light solution capable of handling virtually any items for e-commerce or direct-to-consumer fulfillment

“Vicarious worked closely with our staff to thoroughly understand the kitting process and all of the unique details of production that we assumed only humans could manage. In the end, Vicarious was able to deliver an automated kitting line that provides us with a flexible kitting solution that is cost-effective and most importantly, adherent to the highest quality standards.”
 Scott Miller
Scott Miller “It is remarkable to watch a robotic arm actually improve its performance through practice. Vicarious is helping us automate processes we were unable to automate in the past.”
 Gregg Zegras
Gregg Zegras Over 10 years of advanced research in AI and Robotics published in industry-leading journals including Science, Science Robotics, & NeurIPS.
Featured in New York Times, Wall Street Journal, Washington Post, MIT Technology Review,
and Wired.
Jeff Bezos
Elon Musk
Mark Zuckerberg
Samsung
ABB
Khosla Ventures
Contact our team to see how we can help with intelligent automation at your facility
© 2024 Vicarious All rights reserved